Assembly of the Mindstorms®
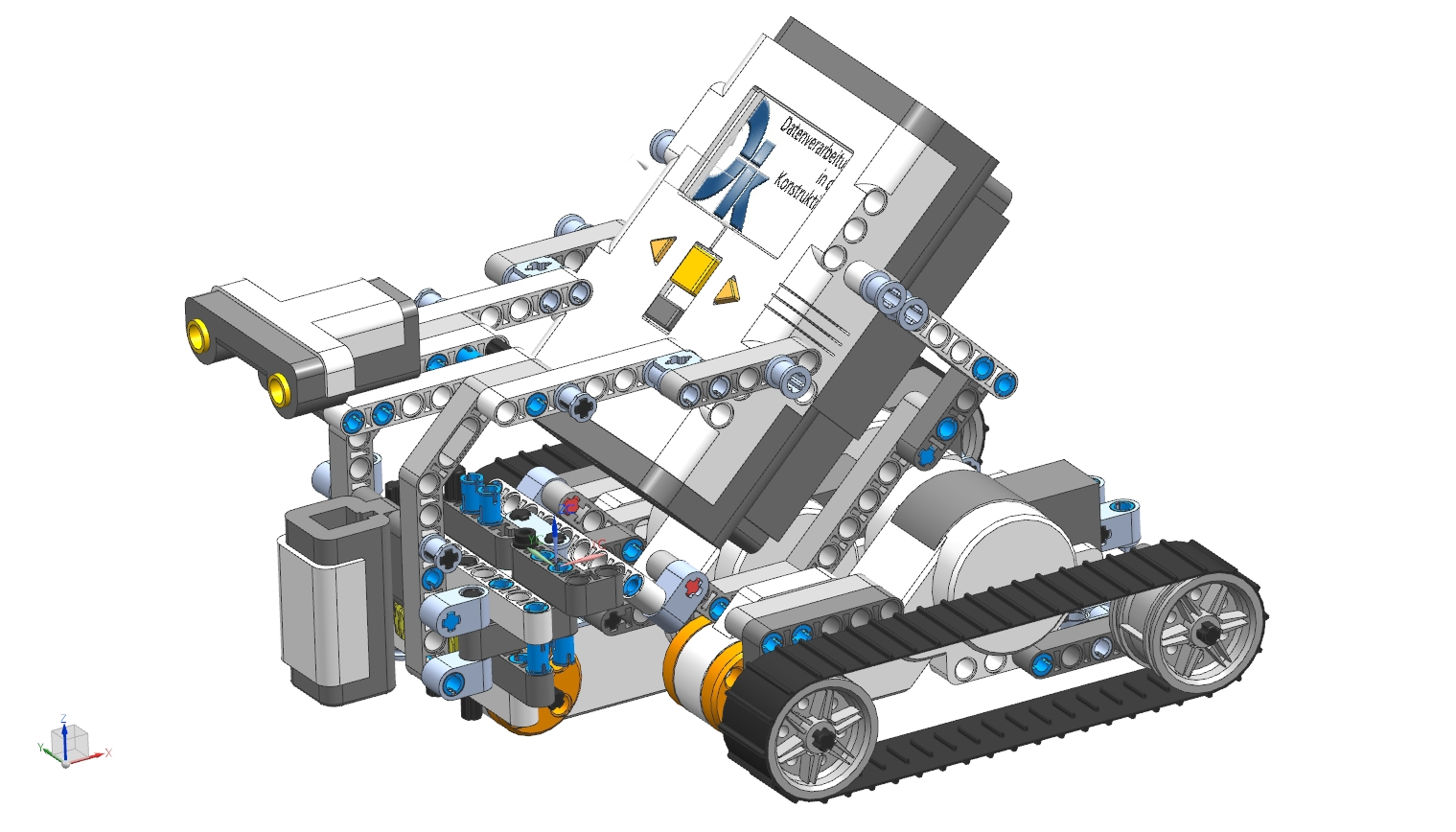
Open the bg_mindstorms (figure "bg_mindstorms") of the user uebung_bg and save it as a new item in your home directory. Follow the naming convention.
Install the following components and sub-assemblies in the bg_mindstorms. You can determine the installation sequence yourself.
Individual parts and subassemblies
You need the following assemblies to assemble your Mindstorm® robot:
- ubg_zange_links
- ubg_zange_rechts
- ubg_sensor_hinten
The first two assemblies are located in Teamcenter, the ubg_sensor_hinten has been created by yourself.
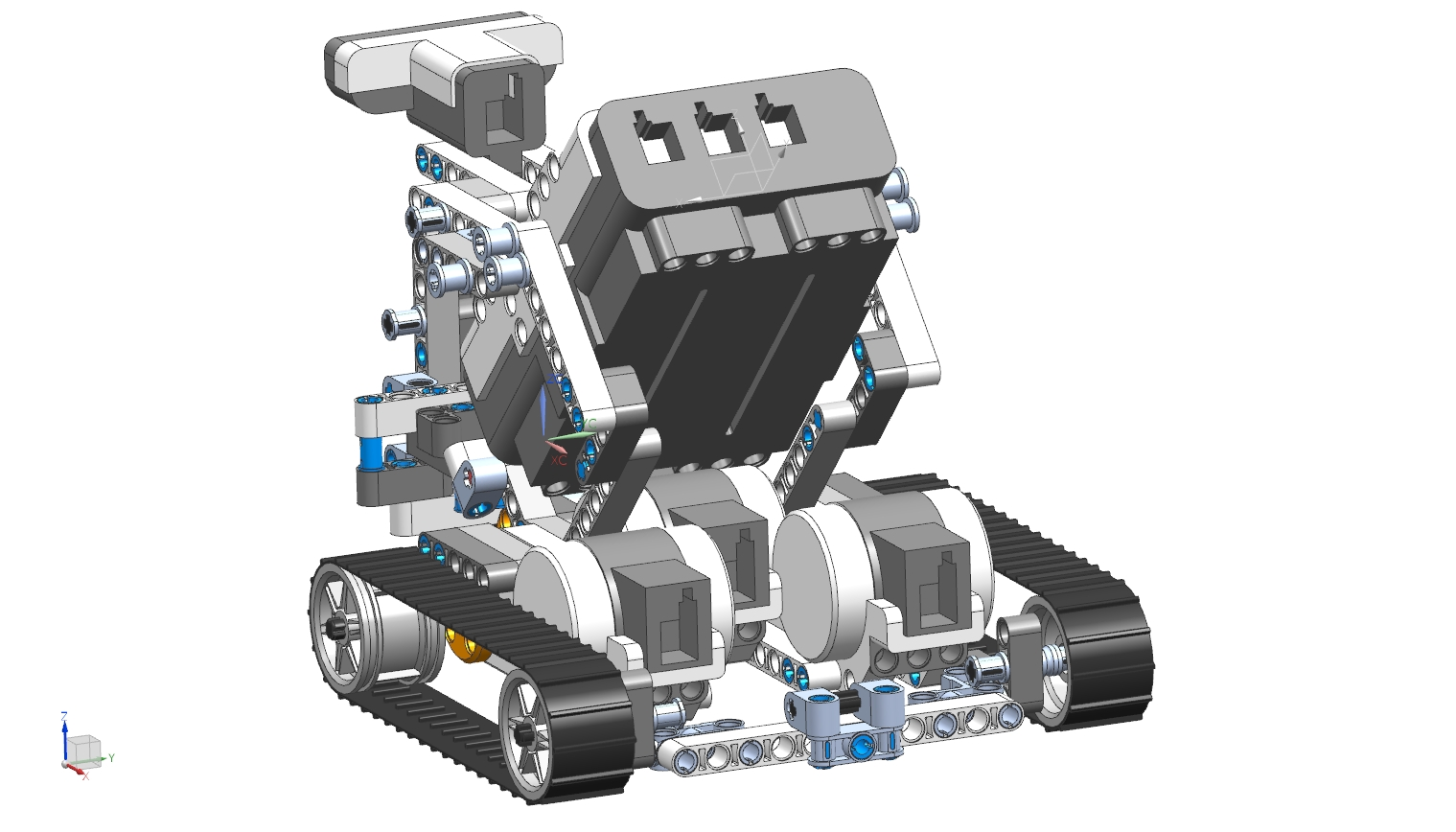
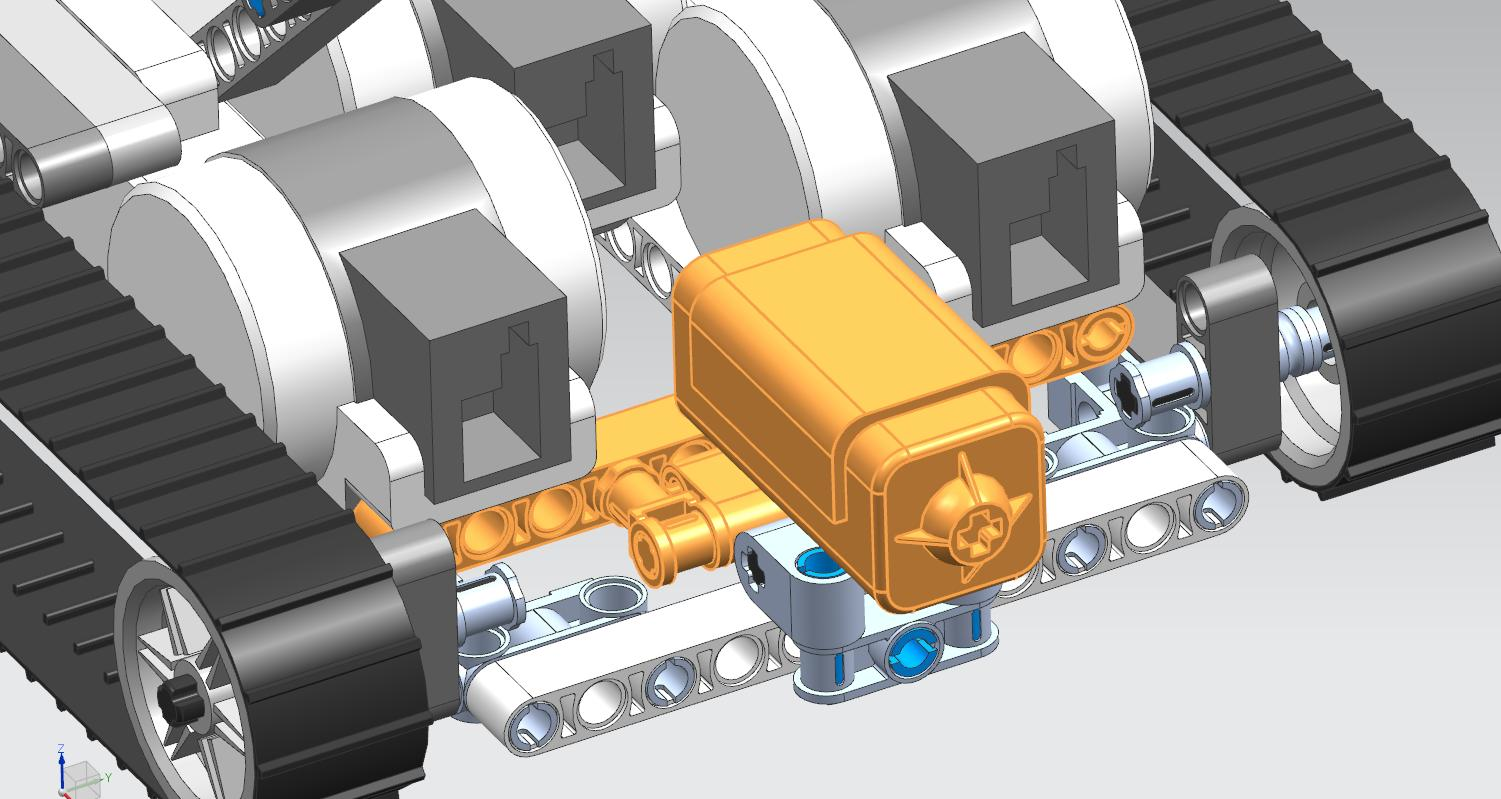
The Steckverbinder on the 11er_balken of the ubg_sensor_hinten belongs to the outer holes on the back of the servo motors. The 3er_stange of the ubg_achse_hinten belongs to the free hole at the ubg_sensor_tast.(Figure "UBG_Fahrzeug from the back", Figure "Position UBG_Sensor_hinten in the vehicle").
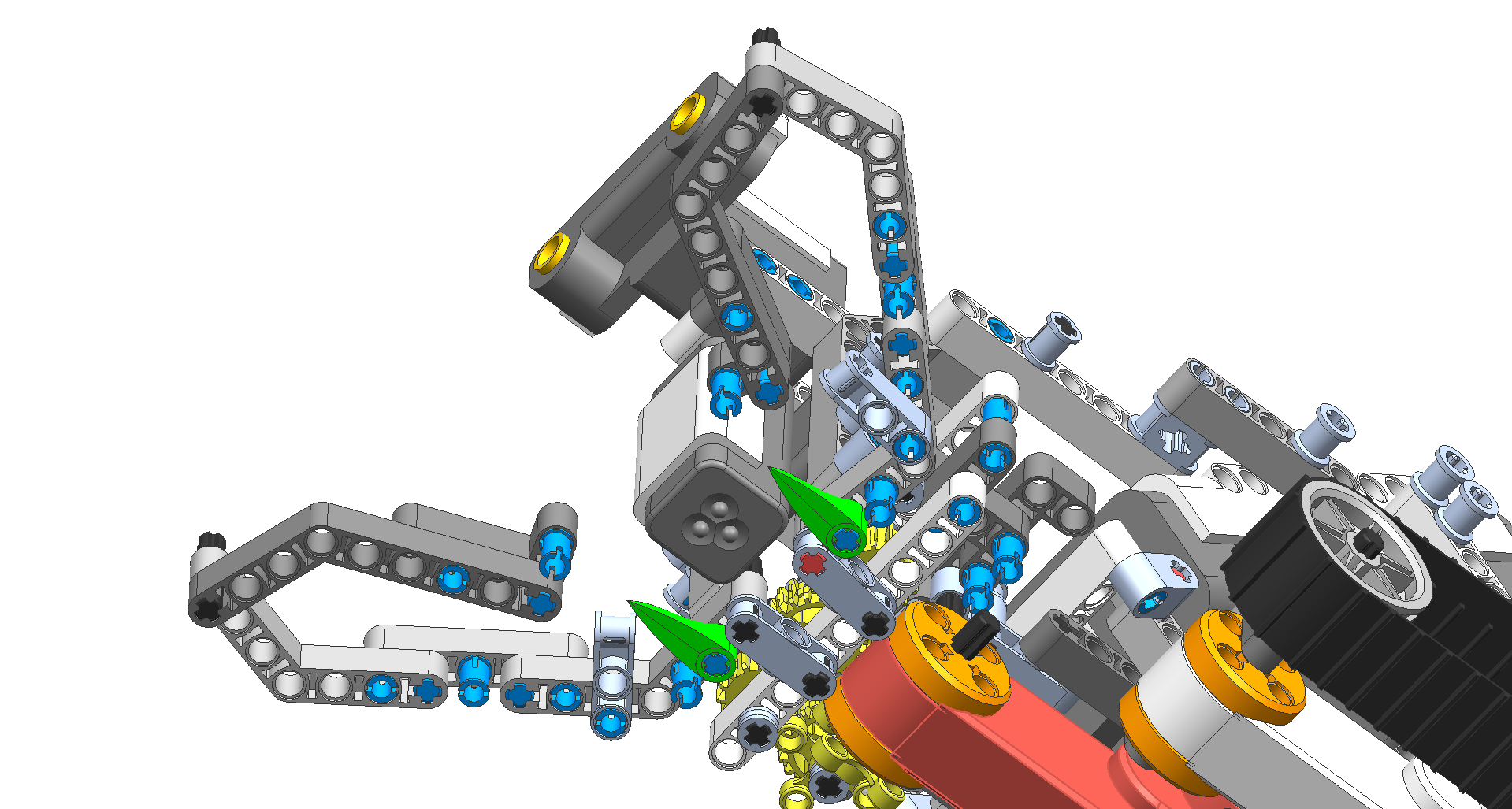
The pliers are to be fixed with the doppel_querverbinder to the 5er_stangen of the ubg_getriebe.
(see figure "Help Installation Pliers")
For road use, you can convert your Mindstorms® robot to wheel drive. Remove the chains and position the tires (reifen) on the rims. (Figure "tires").