Projektbeschreibung
Im Rahmen der diesjährigen Teamarbeit werden Sie an der Entwicklung einer komplexen Fabrik teilnehmen. Ziel der Fabrik ist die Sortierung und Portionierung von Farbkugeln. Diese werden zu Beginn der "Produktion" händisch in beliebigen Zeitintervallen und Kombinationen eingelegt.
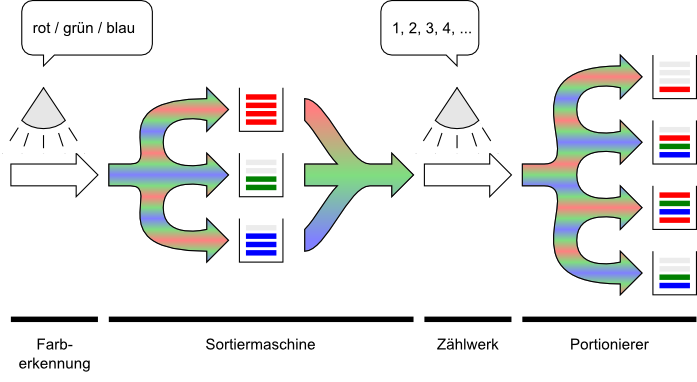
Die Fabrik setzt sich aus 4 Teilmodulen zusammen. Alle Module sind bereits durch ein Spezialistenteam mit LEGO Mindstorms aufgebaut worden. Jeses Modul für sich gesehen setzt sich aus mechanischen und mechatronischen Produkten wie Servoaktuatoren (Motoren) und Sensoren zusammen. Ihnen fällt nun die Aufgabe zu, die Software für jedes dieser mechatronischen Module zu implementieren:
- Farberkennung
- Sortiermaschine
- Zählwerk
- Portionierer
Jedes Modul erfüllt nur eine winzige Teilaufgabe der Produktion. Durch ihr spezielles Design können die Module beliebig angeordnet werden. Die Reihenfolge ist aber vorab durch das Management festgelegt worden (siehe obige Liste).
Zur Steigerung der Produktivität sollen alle Module und der gesamte Prozess zentral überwacht werden. Dazu müssen Sie die Instrumententafel (Dashboard) für die Übersicht über alle Module in MATLAB entwerfen und umsetzen.
Nachfolgend werden die einzelnen Module noch einmal ausführlich beschrieben:
- Farberkennung:
Die Farberkennung kann die Farbe von Kugeln erkennen. Theoretisch kann auch die Anzahl der Kugeln gezählt werden. Dies ist jedoch nicht die Hauptaufgabe der Farberkennung.
Sensoren: Farbsensor an SENSOR_1
Motoren: Laufband an MOTOR_A
- Sortiermaschine:
Die Sortiermaschine kann Kugeln in drei verschiedene Ausgangsfächer vorgegebener Größe einsortieren. Auf Wunsch werden diese Ausgangsfächer geleert. Eine Überlaufkontrolle nach 4 Kugeln existiert nicht. Die Kugeln können einzelnd ausgeworfen werden. Gehen Sie in unserem Beispiel von einer sortierten Ausgabe nach dem FIFO-Prinzip (siehe GeDV-Vorlesung) aus.
Sensoren: keine
Motoren: Bewegung der Ausgangsfächer an MOTOR_A, Auswerfer an MOTOR_B
- Zählwerk:
Das Zählwerk kann Kugeln unabhängig von der Farbe zählen.
Sensoren: Tastsensor an SENSOR_1
Motoren: Laufband an MOTOR_A
- Portionierer:
Der Portionierer erhält die Kugeln und kann diese in verschiedene Ausgänge lenken. Dazu besitzt der Portionierer einen rotierenden Kugelteller. Jeder der 4 Auffangbehälter kann vier Kugeln aufnehmen und auf Wunsch ausgeworfen werden.
Sensoren: keine
Motoren: Laufband an MOTOR_A, Bewegung der Ausgangsfächer an MOTOR_B, Auswerfer an MOTOR_C
- Abschussrampe(optional)
Die Abschussrampe befördert die Kugeln, die aus dem Portionierer ausgeworfen wurden zurück zum ersten Modul (Farberkennung).
Sensoren: keine
Motoren: Laufband an MOTOR_A, Abschussmechanismus an MOTOR_B
Die Implementierung der Software für die oben vorgestellten mechatronischen Module werden im Rahmen dieser Teamarbeit mit der Programmiersprache MATLAB auf Basis der LEGO Mindstorms-Toolbox durchgeführt. Auf den nachfolgenden Seiten erhalten Sie diesbezüglich eine Einführung.